Cette section présente certains modules conçus pour réaliser des corrections particulières des données SPM. L'utilisation des outils basiques de d'édition présentés dans le chapitre Edition et Correction des données permet de corriger la plupart des défauts locaux de scan que l'on trouve souvent sur les images de mesure SPM. Il existe aussi de nombreuses sources d'erreurs liées aux méthodes de mesure SPM aboutissant à des erreurs globales, telles que l'apparition de défauts basse-fréquence ou des dérives des données le long de l'axe lent du scan.

→ →
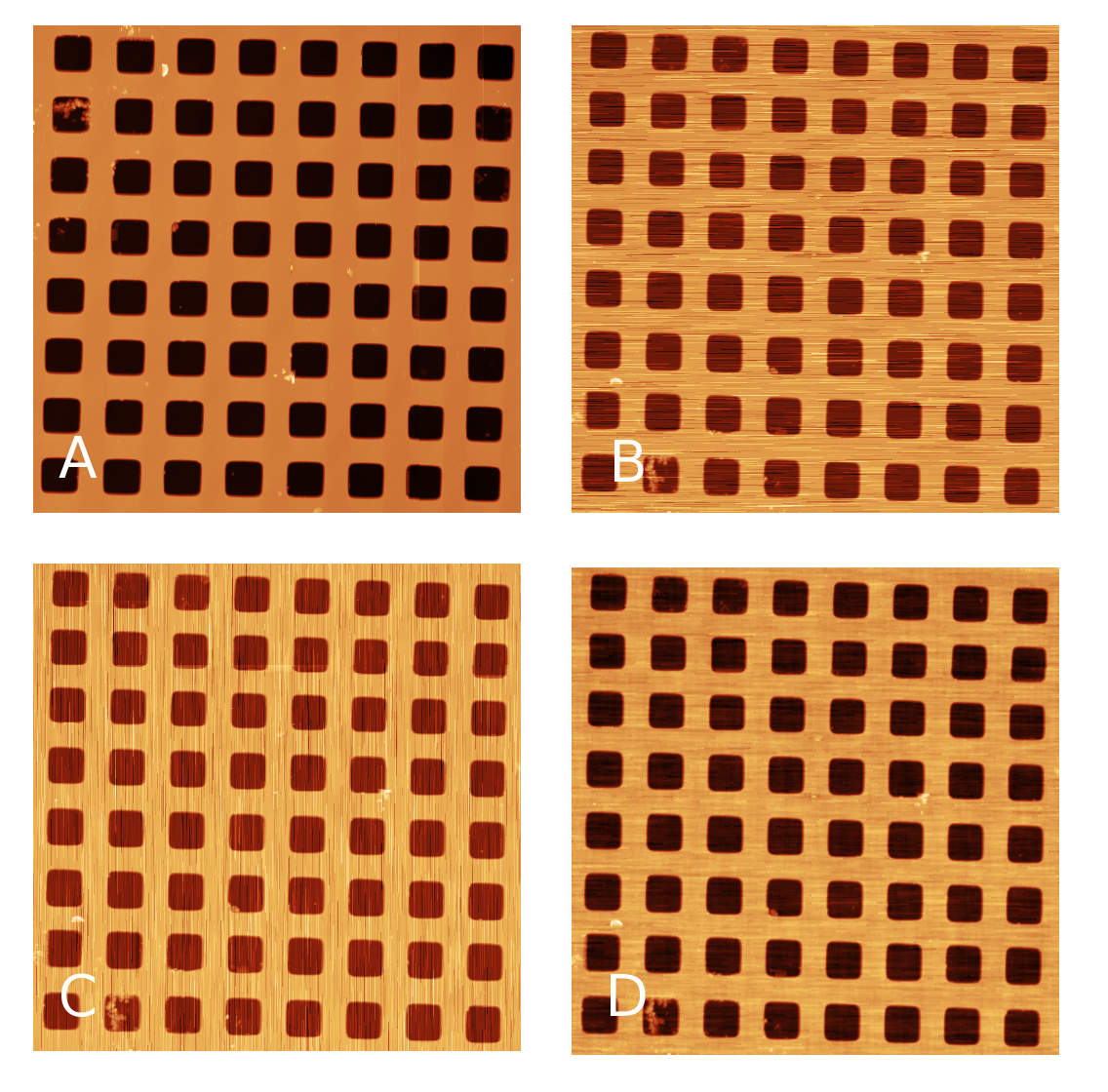
La compensation de la dérive calcule et/ou corrige la dérive le long de l'axe rapide (horizontal) du scan. Cet effet peut être causé par des effets thermiques ou une rigidité mécanique insuffisante de l'instrument de mesure.
Le graphe de dérive, une des sorties possibles du module, affiche le déplacement horizontal de chaque ligne par rapport à une ligne de référence (qui peut être en principe choisi de manière arbitraire, en pratique la référence est déterminée de manière à minimiser la quantité de données sortant de l'image après compensation), avec la coordonnée y de la ligne en abscisse.
La dérive est calculée en deux étapes :
- Un décalage mutuel horizontal est estimé pour chaque couple de lignes dont la distance est inférieure à Search range. Il s'agit du décalage donnant la corrélation maximale entre les deux lignes. On obtient alors l'ensemble des estimations des dérives locales (ainsi qu'une valeur de corrélation maximale permettant d'évaluer leur similarité).
- Les décalages globaux sont calculés à partir des décalages locaux. Pour l'instant la méthode utilisée est très simple mais elle semble suffisante dans la plupart des cas : les dérivées des dérives locales sont ajustées pour chaque ligne sur les estimations des dérives locales, le décalage global est ensuite obtenu par intégration (c'est-à-dire en sommant des dérives locales).
L'option Exclure l'asymétrie lineaire soustrait le terme linéaire du décalage calculé, ce qui peut être utile lorsque l'image est anisotrope et qu'elle contient des structures censées être orientés selon une direction non parallèle aux bords de l'image.

→ →
La distorsion affine dans le plan horizontal provoquée par une dérive thermique est assez courante dans les mesures STM. Si l'image contient une structure régulière, par exemple un réseau atomique dont les paramètres sont connus, on peut facilement corriger la distorsion à l'aide de cette fonction.
La correction de la distorsion affine nécessite d'abord de sélectionner le réseau distordu dans l'image. Cette opération est réalisée en déplaçant à la souris la sélection du réseau sur l'aperçu jusqu'à ce qu'elle corresponde aux motifs réguliers présents dans l'image. Pour les images de réseau réguliers, il est en général plus aisé de sélectionner le réseau sur l'image de la fonction d'autocorrélation (2D ACF). De plus, seule une correspondance approximative est nécessaire dans ce cas. Le bouton permet ensuite d'ajuster les vecteurs du réseau sur les maxima d'autocorrélation, avec une précision inférieure au pixel.
Dans le cas où les lignes de scan contiendraient une grande quantité de bruit haute fréquence, l'ACF horizontale (ligne du milieu dans l'image de l'ACF) peut être elle aussi assez bruitée. Dans ce cas il est préférable de l'interpoler à partir des lignes adjacentes en activant l'option Interpoler l'ACF horizontale.
Les longueurs correctes des vecteurs du réseau a1 et a2 et l'angle φ entre eux, entrés dans la fenêtre de dialogue, déterminent la transformation affine à appliquer. Quelques valeurs communes (telles que celles d'une surface en graphite HOPG) sont prédéfinies, mais il est possible d'entrer des valeurs arbitraires).
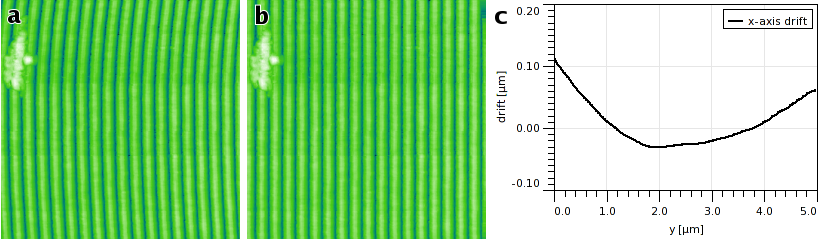
Exemple de correction affine : (a) image originale affectée d'une distorsion affine, (b) fenêtre de dialogue de correction avec le réseau sélectionné sur la fonction d'autocorrélation bi-dimensionnelle, (c) image corrigée.
Notez que la méthode de correction décrite plus haut aboutit à la perte des échelles latérales car celle-ci est alors complètement déterminée par les vecteurs corrects du réseau. Il s'agit généralement de la meilleure option pour les images STM dont les réseaux sont connus, toutefois elle peut s'avérer peu pratique dans certains cas. La fenêtre de dialogue propose ainsi trois choix de mise à l'échelle :
- Tel que spécifié
Les vecteurs du réseau de l'image corrigée auront les longueurs et l'angle spécifiés. L'échelle de l'image originale est complètement perdue.
- Conserver l'aire
Les vecteurs du réseau de l'image corrigée auront le même rapport des longueurs et l'angle. Toutefois, l'échelle globale est calculée de manière à ce que la transformation affine préserve l'aire de l'image.
- Conserver l'échelle X
Les vecteurs du réseau de l'image corrigée auront le même rapport des longueurs et l'angle. Toutefois, l'échelle globale est calculée de manière à ce que la transformation affine préserve l'échelle selon l'axe x de l'image originale. Il s'agit d'un traitement de l'échelle analogue à celui de la compensation de la dérive.
Cette fonction peut aussi corriger une image en utilisant l'ACF calculée à partir d'une autre image (par exemple un canal différent provenant d'une même mesure) ou bien appliquer la correction à toutes les images du fichier. La première possibilité peut être faite en sélectionnant une image différente dans l'option Image pour l'ACF. La transformation affine sur toutes les images d'un fichier est faite en activant Appliquer à toutes les images compatibles. Les deux possibilités nécessitent que les autres images soient compatibles avec l'image courante, c'est-à-dire qu'elles aient des dimensions identiques en termes de pixels et de valeur.

→ →
Une distorsion dans le plan horizontal peut être corrigée ou créée à l'aide la distorsion polynômiale. Cet outil effectue des transformée pouvant être exprimées sous la forme
où Px et Py sont des polynômes pouvant atteindre le troisième ordre et utilisant des coefficients définis par l'utilisateur. Notez la direction de la transformation des coordonnées – la direction inverse ne garantirait pas une fonction non équivoque.
Les coefficients du polynôme sont sans unité, c'est-à-dire que les plages de coordonnées sont toujours [0, 1]. Si la case Mise à jour automatique est activée, la touche Entrée après la saisie d'un coefficient (ou simplement le déplacement vers une autre case) mettra à jour la prévisualisation du résultat.

→ →
L'extraction de données le long d'éléments circulaires, de marches courbes ou de toute autre chemin arbitraire peut être une étape utile avant une analyse plus poussée. La fonnction crée une nouvelle image en « redressant » l'image de départ prise le long d'un chemin défini par un ensemble de points sur l'image de base.
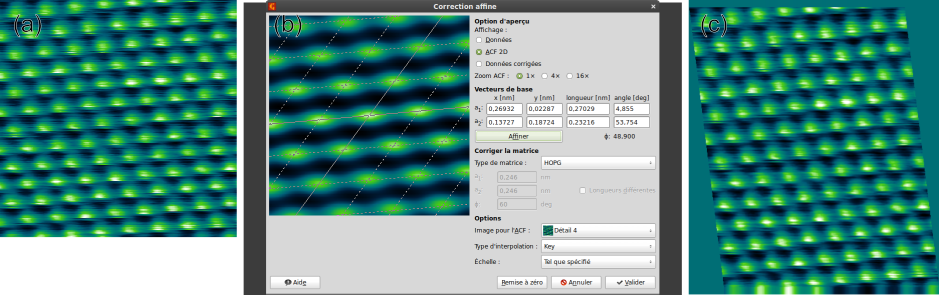
Les points définissant le chemin peuvent être choisis sur l'aperçu. Chaque point de contrôle peut être déplacé à l'aide de la souris. Un clic sur un espace vide ajoutera un nouveau point connecté à l'extrémité la plus proche du chemin. Chaque point peut être supprimé en le sélectionnant dans la liste présente sur le côté gauche de la fenêtre de dialogue, puis en pressant la touche supprimer.
La forme de la zone extraite est contrôlée par les paramètres suivants :
- Épaisseur
Largeur de l'image extraite, indiquée par des graduations perpendiculaires au chemin. Il s'agit de la largeur utile, c'est-à-dire que la distance entre un côté et le chemin vaut la moitié de l'épaisseur.
- Relâchement
Paramètre influençant la forme du chemin entre les points de contrôle. On peut la visualiser comme étant le relâchement d'une corde connectant les points. Avec une valeur nulle la corde est tendue et le chemin est formé de segments droits. L'augmentation du relâchement implique une moindre tension dans la corde, jusqu'à une valeur unitaire indiquant une corde sans tension. Au-delà de un, le relâchement correspond à une longueur de corde en excès, aboutissant à un effort en compression sur la corde.
- Courbe fermée
En activant cette option on ferme le chemin, permettant ainsi l'extraction de formes circulaires (par exemple). Inactivée, cette option donnera un chemin avec deux extrémités.
Pour certaines combinaisons de forme et d'épaisseur, il est possible que l'image résultante contienne des régions situées en dehors de l'image originale. De telles régions sont masquées et remplies par une valeur neutre dans l'image de sortie.
Exemple de redressement de chemin, montrant l'extraction de données le long d'un chemin circulaire fermé. La partie gauche de la fenêtre de dialogue affiche les coordonnées des points définissant le chemin ainsi que les options de la fonction, la partie du milieu affiche le chemin slectionné (avec des marques perpendiculaires donnant l'épaisseur), et la partie droite donne un aperçu des données redressées.

→ →
La fonction redresser le chemin enregistre le chemin et ses données de manière à ce qu'ils puissent être rappelés plus tard. Si vous avez besoin des coordonnées et/ou des directions correspondant à l'image redressées pour des analyses complémentaires, vous pouvez utiliser la fonction .
La fonction affiche sous forme de graphes les coordonnées réelles ou les tangentes au chemin, c'est-à-dire les cosinus et sinus des directions. Les coordonnées sont sélectionnées avec position X et position Y ; les directions avec tangente X et tangente Y. Le nombre de points sur chaque graphe est identique au nombre de lignes de l'image créée lors du redressement de chemin, et il y a une correspondance point à point entre les lignes et les points des courbes.

→ →
Calcule une image débruitée en se basant sur deux mesures de la même zone – l'une réalisée selon la direction x et l'autre selon y (puis tournée de manière à être alignée avec l'image x). Le calcul est basé sur les travaux de E. Anguiano et M. Aguilar (voir [1]). Le module calcule la transformée de Fourier des deux images, combine leurs informations dans l'espace réciproque, puis applique la transformée inverse pour obtenir l'image débruitée. Cette fonction est utile pour la suppression des défauts linéaires et des artefacts le long de l'axe rapide de scan.