Plusieurs modules permettent l'édition directe ou indirecte des données SPM. Dans la plupart des cas, les modules de traitement changent les données d'une manière ou d'une autre. Nous allons décrire dans cette section les modules et outils conçus quant à eux spécifiquement pour corriger des défauts locaux dans l'image. Les fonctions présentées par la suite permettent de supprimer les « mauvaise » données d'une image, puis de les remplacer à l'aide d'algorithmes d'interpolations.

Les profils acquis le long de l'axe rapide scan (en général l'axe x) peuvent être décalés les uns des autres d'une certaine quantité ou bien avoir de légères différences de pente. La fonction basique de correction des lignes → → corrige ce genre de défaut à l'aide de différents algorithmes :
- Les méthodes de correction les plus basiques sont basées sur la recherche d'une hauteur repésentative de chaque ligne et de la soustraire, déplaçant ainsi chaque ligne à la même hauteur. On y trouve par exemple la médiane et la valeur dominante qui soustraient la quantité correspondante de chaque ligne.
- La méthode polynômiale est similaire, sauf qu'elle soustrait un polynôme plutôt qu'une valeur constante. Avec un degré de 0, la valeur moyenne est soustraite de chaque ligne. Avec un degré de 1, ce sont les pentes linéaires qui sont soustraites, puis les courbure avec un degré de 2, etc.
- shifts the lines so that the median of differences (between vertical neighbour pixels) becomes zero, instead of the difference of medians. Therefore it better preserves large features while it is more sensitive to completely bogus lines.
- Pour terminer, la méthode minimise une fonction attribuant plus de poids aux zones planes et un poids plus faible aux zones présentant de fortes pentes. Cet algorithme est plutôt expérimental mais il peut parfois se révéler utile.
Comme pour la mise à niveau polynômiale, l'arrière-plan, c'est-à-dire les valeurs soustraites de chaque ligne, peut être extrait vers une nouvelle image ou affiché sous forme de graphe, étant donnée que la valeur est la même pour toute la ligne.
La correction des ligne tient compte des masques, permettant d'exclure des zones pouvant perturber les algorithmes. Les options du masque ne sont proposées que dans le cas où un masque est présent. Note the Les outils de mise à niveau par chemin décrits ci-dessous proposent une méthode différente de sélection des parties de l'image que l'on souhaite aligner. Cette méthode peut être plus appropriée dans certains cas.
Astuce
Utilisez Ctrl+F () pour appliquer la correction des lignes avec les mêmes paramètres sur plusieurs images sans avoir à afficher la fenêtre de dialogue.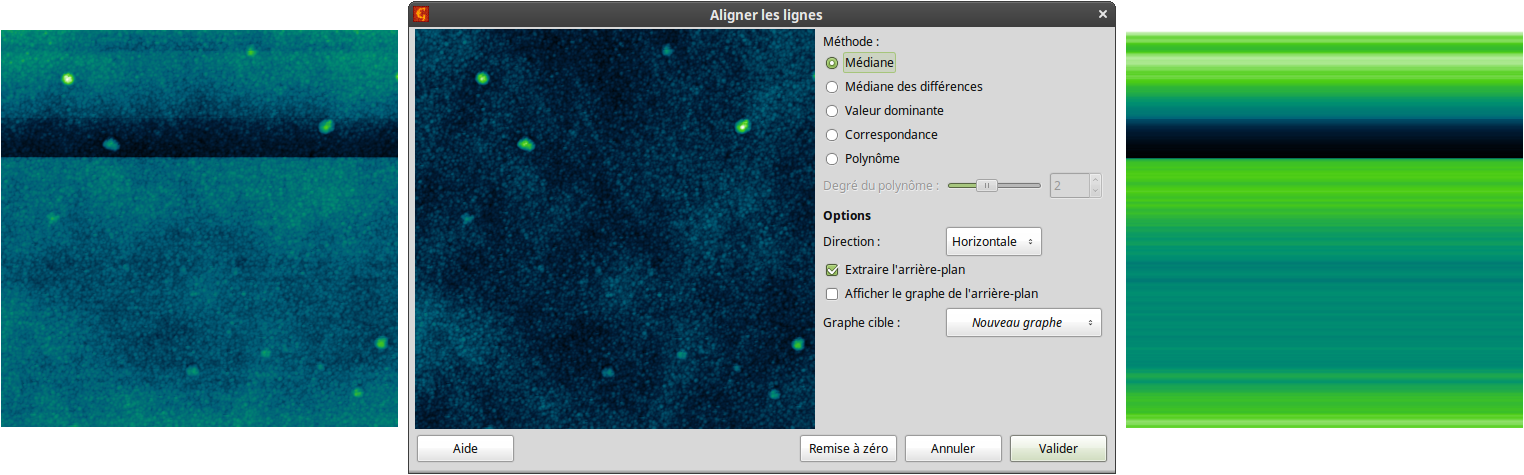
La fonction de tente de corriger les décalages pouvant apparaître au beau milieu d'une ligne. Elle essaie d'identifier les segments désalignés dans les lignes et corrige la hauteur de chacun des segments. Cette fonction est ainsi souvent capable de corriger des données présentant des discontinuités dans une ligne. Elle est toutefois expérimentale et son fonctionnement exact est susceptible d'être modifié.

L'outil Supprimer les points chauds peut être utilisé pour supprimer de petites parties de l'image considérées comme des erreurs de mesure, des poussières ou toute autre chose n'ayant rien à faire dans les données. Notez que cette opération peut avoir une influence importance sur les paramètres statistiques des données, soyez donc certain de ne pas supprimer des données existants réellement sur la surface.
En utilisant cet outil vous pouvez sélectionner la position du point chaud et observer son voisinage dans la fenêtre d'outil. Vous pouvez ensuite sélectionner dans cette fenêtre un rectangle autour de la zone à supprimer. Vous pouvez enfin choisir l'une des méthodes d'interpolation disponibles pour recréer des données à la place de l'ancien « point chaud » :
- Applatissement hyperbolique - utilise les données des bords de la zone sélectionnée pour interpoler les données dans la zone sélectionnée.
- Pseudo-Laplace et solveur laplacien - résoud l'équation de Laplace pour calculer les données dans la zone ; le bord est traité comme une source virtuelle.
- Interpolation fractale - utilise l'image entière pour en déterminer la dimension fractale, puis essaie de créer des données aléatoires ayant la même dimension fractale et les place dans la zone sélectionnée.
L'exécution de l'algorithme se lance en cliquant sur .
Note
L'outil de suppression des points chauds ne fonctionnera que pour des zones inférieures ou égales à 64 × 64 pixels. Pour supprimer de plus grandes zones utilisez l' éditeur de masque, puis utilisez → → .

L'outil de suppression de grains permet de supprimer les parties continues d'un masque ou d'interpoler les données situées sous le masque, ou de faire les deux à la fois. La partie du masque à supprimer peut être sélectionnée en faisant un clic-gauche dessus..

→ →
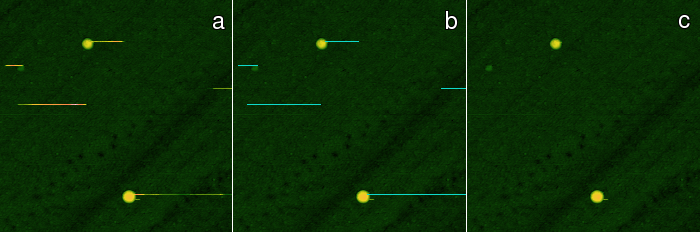
Les défauts linéaires correspondent à des parties de l'image affectées par une errreur commune lors d'une mesure par balayage : une erreur locale de la boucle de rétroaction. Les défauts linéaires sont en général parallèle à l'axe rapide de balayage sur l'image. Cette fonction trouve et supprime automatiquement ces défauts en utilisant les lignes adjacentes pour « remplir » les espaces. Le traitement est lancé en utilisant les derniers réglages utilisés dans la fonction Marquer les défauts linéaires.

→ →
De manière similaire, le module
Marquer les défauts linéaires permet de créer un
masque sur les points considérés comme des défauts linéaires.
Contrairement à la
suppression des défauts linéaires
qui interpole directement les défauts localisés, ce module vous permet
d'ajuster plusieurs paramètres de manière à régler finement la sélection
des défauts linéaires :
- Largeur maximale – seuls les défauts linéaires de largeur inférieure ou égale à cette valeur (en pixels) seront marqués.
- Longueur minimale – seuls les défauts linéaires de longueur supérieure ou égale à cette valeur (en pixels) seront marqués.
- Seuil dur – différence minimale des valeurs the minimum difference of the value from the neighbouring upper and lower lines to be considered a defect. The units are relative to image RMS.
- Seuil doux – values differing at least this much do not form defects themselves, but they are attached to defects obtained from the hard threshold if they touch one.
- Positif, négatif, les deux – le type de défauts à supprimer. Positif correspond aux défauts ayant des valeurs au-dessus de la normale (pics), et négatif correspond aux défauts ayant des valeurs en-dessous de la normale (trous).
Après avoir cliqué sur le nouveau masque de défauts est appliqué à l'image. D'autres modules ou outils peuvent être utilisés pour modifier ces données.

→ →
Cette fonction remplace les donneés situées sous le masque en résolvant l'équation de Laplace. Les données autour des zones masquées servent de conditions aux limites. La solution est calculée de manière itérative, la convergence peut donc prendre un peu de temps..

→ →
Le module de correction fractale, tout comme le module de suppression des données sous le masque, remplace les données situées sous le masque. Il utilise toutefois un algorithme différent pour déterminer les nouvelles données : la dimension fractale de l'image complète est tout d'abord calculée, puis les données sous le masque sont substituées par une surface aléatoire ayant la même dimension fractale. La hauteur quadratique moyenne des irrégularités (rugosité) n'est pas affectée par l'utilisation de ce module.
Note
Ce calcul peut prendre un certain temps, soyez donc patients.Avertissement
Le fait de lancer ce module sur des données n'ayant pas de propriétés fractales n'est pas du tout recommandé car cela peut aboutir à des résultats totalement irréalistes.
→ →
Ce module crée un masque des zones ne passant pas le critère 3σ. Toutes les valeurs au-delà ou en-deçà de cet intervalle de confiance sont masquées et peuvent ensuite être éditées ou traitées par d'autres modules, par supprimer les données sous le masque. Cette méthode de marquage est utile pour les points aberrants globaux dont les valeurs sont éloignées du reste des données.

→ →
Les points aberrants locaux ont des valeurs qui ressortent de leur voisinage. La fonction marque les données ne semblant pas appartenir à la distribution des valeurs voisines.
Le type des points aberrants sélectionnés peut être positif, négatif ou les deux ; repectivement pour les valeurs plus élevées que le voisinage, plus faibles, ou pour les deux simultanément. Notez que le fait de sélectionner les deux peut marquer des zones différentes de la combinaison des zones obtenues séparément avec les points aberrants positifs et négatifs.
Le marquage s'effectue en soustrayant un arrière-plan local de l'image puis en marquant les points aberrants locaux dans l'image aplatie résultant de l'opération précedente. Plus précisément, l'arrière-plan local est obtenu par une ouverture (minimum), une fermeture (maximum) ou un fitre médian de rayon donné. Le rayon du filtre est contrôlé par le paramètre rayon des défauts. Il détermine la taille maximale des défauts qui seront trouvés et marqués. Il est toutefois souvent utile de choisir un rayon plus grand que le maximum réel des défauts.
La sensibilité du marquage des défauts est contrôlée par l'option seuil. Une petite valeur donnera un marquage conservatif, c'est-à-dire avec moins de valeurs marquées. Une valeur plus large aboutira à plus de points aberrants marqués.

L'outil de mise à niveau par chemin peut être utilisé pour corriger les hauteurs d'un groupe de lignes dans les images complexes.
On commence d'abord par sélectionner un certain nombre de lignes dans les données. Les intersections de ces lignes avec les lignes de l'image forment alors un ensemble de points dans chaque ligne utilisée pour la mise à niveau. Les lignes de l'image sont alors montées ou abaissées pour minimiser la différence de hauteur avec les points des lignes adjacentes. Les lignes de l'image n'ayant aucune intersection avec les lignes de sélection ne sont pas ajustée (par rapport aux lignes adjacentes).

→ →
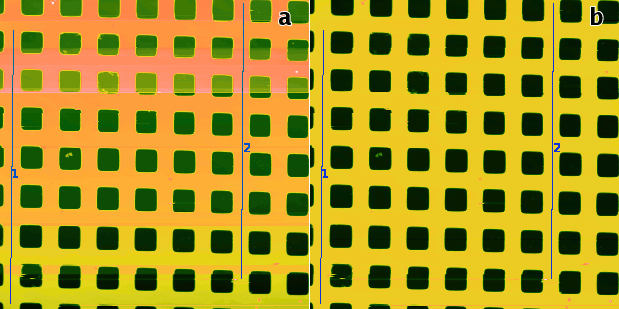
La dérotation permet d'ajuster automatiquement les directions principales d'une image de manière à ce qu'elles soient parallèles avec les bords horizontaux et/ou verticaux de l'image. Pour ce calcul, les données doivent présenter des directions principales, ce qui en fait une fonction utile pour les scans des structures artificielles ou cristallines.
La rotation nécessaire pour redresser l'image – affichée dans Correction – est calculée à partir des pics présents dans la distribution angulaire des pentes en supposant qu'il existe un type de structure ou une symétrie principale. La symétrie peut être estimée de manière automatique, mais il est aussi possible de sélectionner un type de symétrie particulier et laisser le module calculer la correction de rotation correspondante. Notez que si vous sélectionnez un type ne correspondant pas à la structure, la rotation calculée aura peut de chance d'être correcte.
Il est recommandé de commencer par mettre à niveau (ou mettre à niveau les facettes) les données, car la pente globale peut biaiser la calcul de la rotation.

Le type de structure supposé peut être modifié avec la sélection Hypothèse. Les choix suivants sont disponibles :
- Detecté
Type de symétrie détecté automatiquement, affiché ci-dessus avec Detecté.
- Parallèle
Lignes parallèles, une seule direction principale.
- Triangulaire
Symétrie triangulaire, trois directions principales (unilatérales) à 120 degrés.
- Carré
Symétrie carrée, deux directions principales orientées approximativement le long des côtés de l'image.
- Rhombique
Symétrie rhombique, deux directions principales orientées approximativement selon les diagonales. La seule différence avec la symétrie carrée est l'orientation diagonale (contrairement au parallélisme par rapport aux côtés).
- Hexagonal
Symétrie hexagonale, trois directions principales (bilatérales) à 120 degrés.